3D_SLAM_Simultaneous_Localization_And_Mapping_Trends_And_Humanoid_Robot_Linkages
https://www.pirahansiah.com/farshid/portfolio/publications/Journals/3D_SLAM_Simultaneous_Localization_And_Mapping_Trends_And_Humanoid_Robot_Linkages/
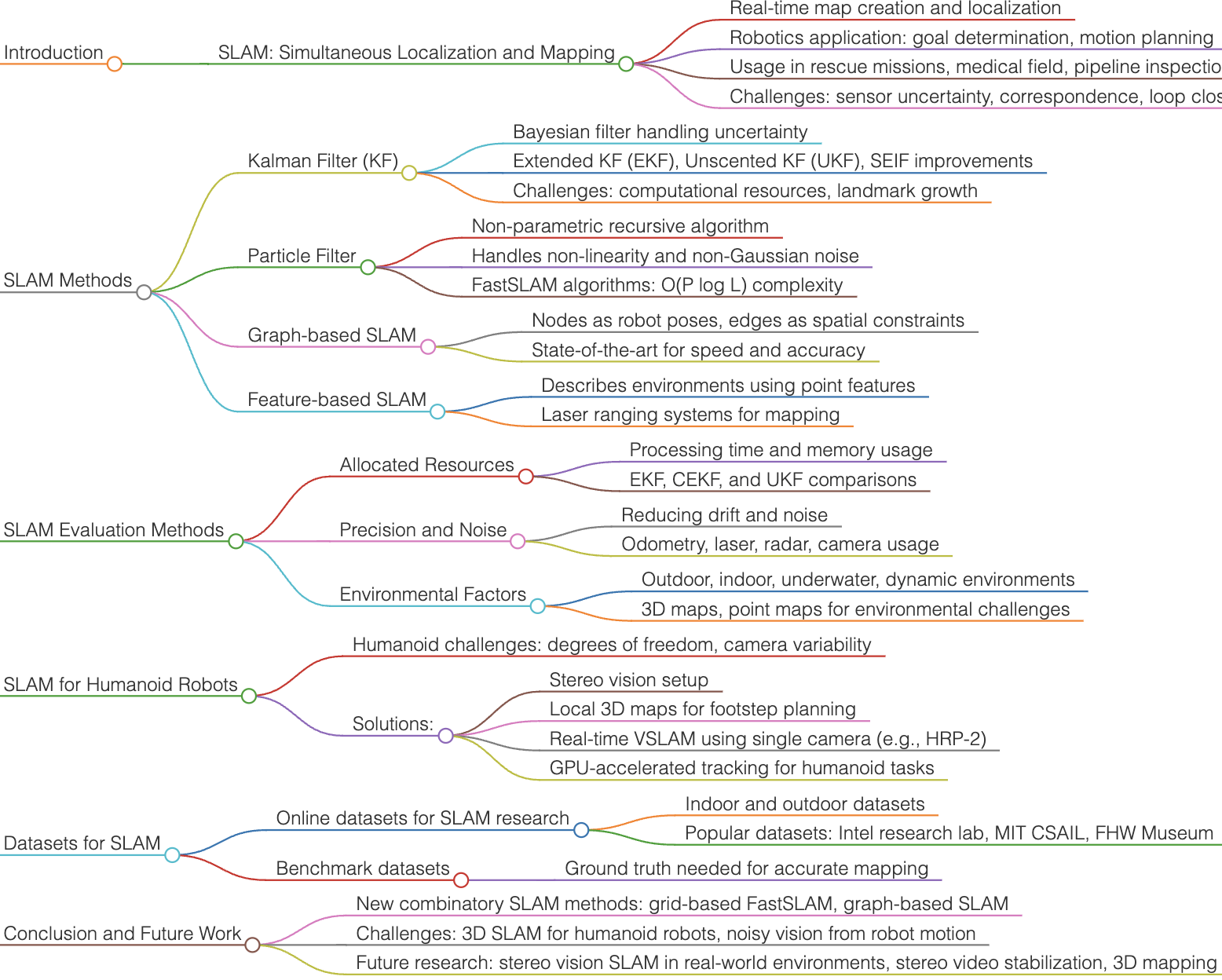
Simultaneous Localization and Mapping Trends and Humanoid Robot Linkages
1. Introduction
- SLAM: Simultaneous Localization and Mapping
- Real-time map creation and localization
- Robotics application: goal determination, motion planning
- Usage in rescue missions, medical field, pipeline inspection, and more
- Challenges: sensor uncertainty, correspondence, loop closing, time complexity
2. SLAM Methods
- Kalman Filter (KF)
- Bayesian filter handling uncertainty
- Extended KF (EKF), Unscented KF (UKF), SEIF improvements
- Challenges: computational resources, landmark growth
- Particle Filter
- Non-parametric recursive algorithm
- Handles non-linearity and non-Gaussian noise
- FastSLAM algorithms: O(P log L) complexity
- Graph-based SLAM
- Nodes as robot poses, edges as spatial constraints
- State-of-the-art for speed and accuracy
- Feature-based SLAM
- Describes environments using point features
- Laser ranging systems for mapping
3. SLAM Evaluation Methods
- Allocated Resources
- Processing time and memory usage
- EKF, CEKF, and UKF comparisons
- Precision and Noise
- Reducing drift and noise
- Odometry, laser, radar, camera usage
- Environmental Factors
- Outdoor, indoor, underwater, dynamic environments
- 3D maps, point maps for environmental challenges
4. SLAM for Humanoid Robots
- Humanoid challenges: degrees of freedom, camera variability
- Solutions:
- Stereo vision setup
- Local 3D maps for footstep planning
- Real-time VSLAM using single camera (e.g., HRP-2)
- GPU-accelerated tracking for humanoid tasks
5. Datasets for SLAM
- Online datasets for SLAM research
- Indoor and outdoor datasets
- Popular datasets: Intel research lab, MIT CSAIL, FHW Museum
- Benchmark datasets
- Ground truth needed for accurate mapping
6. Conclusion and Future Work
- New combinatory SLAM methods: grid-based FastSLAM, graph-based SLAM
- Challenges: 3D SLAM for humanoid robots, noisy vision from robot motion
- Future research: stereo vision SLAM in real-world environments, stereo video stabilization, 3D mapping